# ethercat
**Repository Path**: yu-wanliddd/ethercat
## Basic Information
- **Project Name**: ethercat
- **Description**: No description available
- **Primary Language**: Unknown
- **License**: Not specified
- **Default Branch**: main
- **Homepage**: None
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2025-12-22
- **Last Updated**: 2025-12-22
## Categories & Tags
**Categories**: Uncategorized
**Tags**: None
## README
# ⚙️ 基于 STM32 的 EtherCAT 主站运动控制系统
[]()
[]()
[]()
[]()
[]()
> 🧠 **Author:** Leon Xu(徐领航)
> 📅 **Date:** 2025.05
> 📄 完整技术说明书见 [Docs/基于STM32的EtherCAT主站运动控制系统说明书.pdf](Docs/基于STM32的EtherCAT主站运动控制系统说明书.pdf)
---
## 📘 项目简介 | Overview
本项目基于 **STM32H743** 平台实现嵌入式 **EtherCAT 主站运动控制系统**。
通过移植 **SOEM (Simple Open EtherCAT Master)** 协议栈,实现对多台伺服电机的 **周期同步位置控制(CSP)**。
系统融合了 **高精度时钟同步(68μs ±1μs)** 与 **梯形加减速轨迹规划算法**,可实现工业级实时控制与高稳定性。
本系统可广泛应用于:
- 工业机器人多轴协调控制
- 数控机床、运动平台系统
- 智能制造与嵌入式运动控制设备
---
## 🧩 系统架构 | System Architecture
| 层级 | 主要函数 / 模块 | 功能说明 |
|------|------------------|-----------|
| 🟩 **Application Layer** | `MotorController_Init()`
`MotorController_Update()`
`ecat_loop()` | 三段式速度规划初始化
实时增量计算与调度
EtherCAT 主循环任务 |
| 🟦 **Protocol Stack Layer (SOEM)** | `ecat_init()`
`Zeroer_Nsetup()`
`Zeroer_CSPInit()`
`ec_dcsync0()` | EtherCAT 主站初始化与从站识别
对象字典与 PDO 映射
CSP 模式初始化
分布式时钟同步(68 μs) |
| 🟨 **Hardware Driver Layer (HAL)** | `MX_ETH_Init()`
`LAN8720_Init()`
`MX_TIM4_Init()`
`FreeRTOS (可选)` | MAC + DMA 初始化
PHY 自动协商与复位
1 kHz 周期定时驱动任务
实时任务管理 |
---
## ⚙️ 核心特性 | Key Features
| 模块 | 功能描述 |
|------|-----------|
| 🧩 多轴同步控制 | 基于 EtherCAT CSP 模式,支持多伺服周期同步控制 |
| ⚡ 高精度周期通信 | 68μs ±1μs 通信周期,低抖动高鲁棒性 |
| 🚀 梯形加减速算法 | 平滑运动、低冲击、快速响应 |
| 🔧 模块化设计 | 底层驱动 / 协议栈 / 应用层清晰分层 |
| 📡 串口控制命令 | 通过 UART 下发 “GOTO / STOP / STATUS”等命令 |
| 🧠 实时插补 | 每周期实时生成位移目标,保持轨迹连续性 |
---
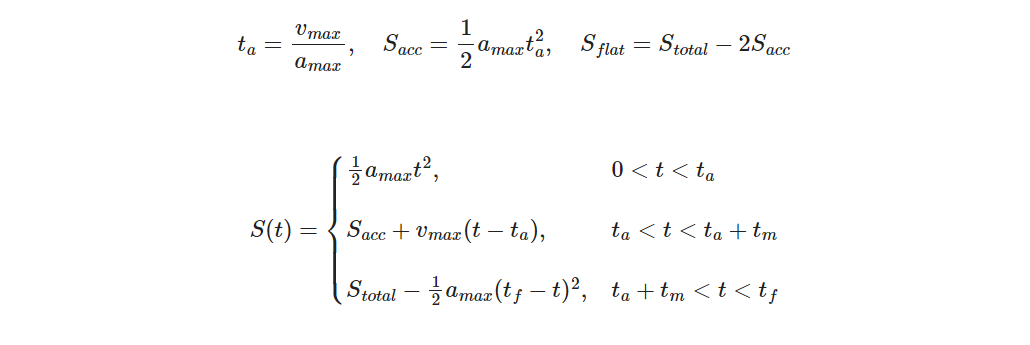
## 🧮 三段式梯形加减速算法 (Trapezoidal Velocity Profile)
该算法通过加速、匀速、减速三阶段控制伺服位移,实现平滑轨迹与稳定加减速。
公式如下:
 ---
## 📡 串口控制指令 | Serial Commands
| 分类 | 指令格式 | 示例 | 功能说明 |
|------|-----------|------|-----------|
| 🔹 **系统初始化** | `INIT` | `INIT` | 系统初始化,进入待命状态 |
| 🔹 **单轴运动控制** | `M GOTO V A ` | `M1 GOTO 3309126 V 30 A 1` | 控制第 n 号电机以指定速度和加速度运动至目标位置 |
| 🔹 **单轴停止** | `M STOP` | `M2 STOP` | 停止指定电机的当前运动 |
| 🔹 **六轴停止** | `ALL STOP` | `ALL STOP` | 同时停止所有电机运动 |
| 🔹 **帮助信息** | `HELP` | `HELP` | 输出所有支持的指令及使用说明 |
---
## 🧱 硬件配置 | Hardware Setup
| 硬件 | 型号 / 描述 |
|------|---------------|
| MCU | STM32H743IIT6 (Cortex-M7, 400MHz) |
| PHY | LAN8720A (RMII 接口) |
| 伺服电机 | eRob70H100T-BM-18EN / eRob80H100T-BM-18EN |
| 电源 | 明纬 48V / 1200W |
| 调试器 | J-Link v9 |
| 开发环境 | STM32CubeIDE / Keil MDK 5 |
---
## 🧰 项目结构 | Project Structure
| 文件夹 / 文件 | 说明 |
|----------------|------|
| **Core/** | 核心代码目录 |
| ├── **Inc/** | 头文件目录(包含 PID、Motion、Protocol 等) |
| └── **Src/** | 源文件目录(主要功能实现) |
| **Drivers/** | STM32 HAL 底层驱动文件 |
| **Ethercat/** | SOEM 协议栈与 EtherCAT 通信实现 |
| **Docs/** | 技术文档与说明书 |
| └── `基于STM32的EtherCAT主站运动控制系统说明书.pdf` | 系统设计说明书(完整技术文档) |
| **MDK-ARM/** | Keil MDK 工程文件 |
| **Readme/** | 附加参考文档与实验记录 |
| **README.md** | 项目主页介绍文件 |
---
## 🎥 演示视频 | Demo Video
[](https://www.bilibili.com/video/BVxxxxxxxxx/)
> 视频展示了 STM32 EtherCAT 主站对多伺服电机进行实时同步控制与加减速插补的效果。
---
## 🚀 快速上手 | Getting Started
### 1️⃣ 编译与下载
1)打开 STM32CubeIDE 或 Keil MDK 工程
2)选择目标芯片 STM32H743
3)编译并通过 J-Link 下载至目标板
### 2️⃣ 串口连接
波特率: 115200
数据位: 8
停止位: 1
校验位: 无
使用串口助手输入指令即可控制伺服动作。
---
---
## 📡 串口控制指令 | Serial Commands
| 分类 | 指令格式 | 示例 | 功能说明 |
|------|-----------|------|-----------|
| 🔹 **系统初始化** | `INIT` | `INIT` | 系统初始化,进入待命状态 |
| 🔹 **单轴运动控制** | `M GOTO V A ` | `M1 GOTO 3309126 V 30 A 1` | 控制第 n 号电机以指定速度和加速度运动至目标位置 |
| 🔹 **单轴停止** | `M STOP` | `M2 STOP` | 停止指定电机的当前运动 |
| 🔹 **六轴停止** | `ALL STOP` | `ALL STOP` | 同时停止所有电机运动 |
| 🔹 **帮助信息** | `HELP` | `HELP` | 输出所有支持的指令及使用说明 |
---
## 🧱 硬件配置 | Hardware Setup
| 硬件 | 型号 / 描述 |
|------|---------------|
| MCU | STM32H743IIT6 (Cortex-M7, 400MHz) |
| PHY | LAN8720A (RMII 接口) |
| 伺服电机 | eRob70H100T-BM-18EN / eRob80H100T-BM-18EN |
| 电源 | 明纬 48V / 1200W |
| 调试器 | J-Link v9 |
| 开发环境 | STM32CubeIDE / Keil MDK 5 |
---
## 🧰 项目结构 | Project Structure
| 文件夹 / 文件 | 说明 |
|----------------|------|
| **Core/** | 核心代码目录 |
| ├── **Inc/** | 头文件目录(包含 PID、Motion、Protocol 等) |
| └── **Src/** | 源文件目录(主要功能实现) |
| **Drivers/** | STM32 HAL 底层驱动文件 |
| **Ethercat/** | SOEM 协议栈与 EtherCAT 通信实现 |
| **Docs/** | 技术文档与说明书 |
| └── `基于STM32的EtherCAT主站运动控制系统说明书.pdf` | 系统设计说明书(完整技术文档) |
| **MDK-ARM/** | Keil MDK 工程文件 |
| **Readme/** | 附加参考文档与实验记录 |
| **README.md** | 项目主页介绍文件 |
---
## 🎥 演示视频 | Demo Video
[](https://www.bilibili.com/video/BVxxxxxxxxx/)
> 视频展示了 STM32 EtherCAT 主站对多伺服电机进行实时同步控制与加减速插补的效果。
---
## 🚀 快速上手 | Getting Started
### 1️⃣ 编译与下载
1)打开 STM32CubeIDE 或 Keil MDK 工程
2)选择目标芯片 STM32H743
3)编译并通过 J-Link 下载至目标板
### 2️⃣ 串口连接
波特率: 115200
数据位: 8
停止位: 1
校验位: 无
使用串口助手输入指令即可控制伺服动作。
---