# jetson-containers
**Repository Path**: cmpute/jetson-containers
## Basic Information
- **Project Name**: jetson-containers
- **Description**: Mirror of dusty-nv/jetson-containers
- **Primary Language**: Docker
- **License**: MIT
- **Default Branch**: master
- **Homepage**: https://github.com/dusty-nv/jetson-containers
- **GVP Project**: No
## Statistics
- **Stars**: 0
- **Forks**: 0
- **Created**: 2025-11-13
- **Last Updated**: 2025-11-13
## Categories & Tags
**Categories**: Uncategorized
**Tags**: mirror
## README
[](https://www.jetson-ai-lab.com)
[](https://pypi.jetson-ai-lab.io)
# CUDA Containers for Edge AI & Robotics
Modular container build system that provides the latest [**AI/ML packages**](https://pypi.jetson-ai-lab.io/) for [NVIDIA Jetson](https://jetson-ai-lab.com) :rocket::robot:
| | |
|--------------------|--------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------|
| **ML** | [`pytorch`](packages/pytorch) [`tensorflow`](packages/ml/tensorflow) [`jax`](packages/ml/jax) [`onnxruntime`](packages/ml/onnxruntime) [`deepstream`](packages/cv/deepstream) [`holoscan`](packages/cv/holoscan) [`CTranslate2`](packages/ml/ctranslate2) [`JupyterLab`](packages/ml/jupyterlab) |
| **LLM** | [`SGLang`](packages/llm/sglang) [`vLLM`](packages/llm/vllm) [`MLC`](packages/llm/mlc) [`AWQ`](packages/llm/awq) [`transformers`](packages/llm/transformers) [`text-generation-webui`](packages/llm/text-generation-webui) [`ollama`](packages/llm/ollama) [`llama.cpp`](packages/llm/llama_cpp) [`llama-factory`](packages/llm/llama-factory) [`exllama`](packages/llm/exllama) [`AutoGPTQ`](packages/llm/auto_gptq) [`FlashAttention`](packages/attention/flash-attention) [`DeepSpeed`](packages/llm/deepspeed) [`bitsandbytes`](packages/llm/bitsandbytes) [`xformers`](packages/llm/xformers) |
| **VLM** | [`llava`](packages/vlm/llava) [`llama-vision`](packages/vlm/llama-vision) [`VILA`](packages/vlm/vila) [`LITA`](packages/vlm/lita) [`NanoLLM`](packages/llm/nano_llm) [`ShapeLLM`](packages/vlm/shape-llm) [`Prismatic`](packages/vlm/prismatic) [`xtuner`](packages/vlm/xtuner) [`gemma_vlm`](packages/vlm/gemma_vlm) |
| **VIT** | [`NanoOWL`](packages/vit/nanoowl) [`NanoSAM`](packages/vit/nanosam) [`Segment Anything (SAM)`](packages/vit/sam) [`Track Anything (TAM)`](packages/vit/tam) [`clip_trt`](packages/vit/clip_trt) |
| **RAG** | [`llama-index`](packages/rag/llama-index) [`langchain`](packages/rag/langchain) [`jetson-copilot`](packages/rag/jetson-copilot) [`NanoDB`](packages/vectordb/nanodb) [`FAISS`](packages/vectordb/faiss) [`RAFT`](packages/ml/rapids/raft) |
| **L4T** | [`l4t-pytorch`](packages/ml/l4t/l4t-pytorch) [`l4t-tensorflow`](packages/ml/l4t/l4t-tensorflow) [`l4t-ml`](packages/ml/l4t/l4t-ml) [`l4t-diffusion`](packages/ml/l4t/l4t-diffusion) [`l4t-text-generation`](packages/ml/l4t/l4t-text-generation) |
| **CUDA** | [`cupy`](packages/numeric/cupy) [`cuda-python`](packages/cuda/cuda-python) [`pycuda`](packages/cuda/pycuda) [`cv-cuda`](packages/cv/cv-cuda) [`opencv:cuda`](packages/cv/opencv) [`numba`](packages/numeric/numba) |
| **Robotics** | [`ROS`](packages/robots/ros) [`LeRobot`](packages/robots/lerobot) [`OpenVLA`](packages/vla/openvla) [`3D Diffusion Policy`](packages/diffusion/3d_diffusion_policy) [`Crossformer`](packages/diffusion/crossformer) [`MimicGen`](packages/sim/mimicgen) [`OpenDroneMap`](packages/robots/opendronemap) [`ZED`](packages/hardware/zed) [`openpi`](packages/robots/openpi) |
| **Simulation** | [`Isaac Sim`](packages/sim/isaac-sim) [`Genesis`](packages/sim/genesis) [`Habitat Sim`](packages/sim/habitat-sim) [`MimicGen`](packages/sim/mimicgen) [`MuJoCo`](packages/sim/mujoco) [`PhysX`](packages/sim/physx) [`Protomotions`](packages/sim/protomotions) [`RoboGen`](packages/sim/robogen) [`RoboMimic`](packages/sim/robomimic) [`RoboSuite`](packages/sim/robosuite) [`Sapien`](packages/sim/sapien) |
| **Graphics** | [`3D Diffusion Policy`](packages/diffusion/3d_diffusion_policy) [`AI Toolkit`](packages/diffusion/ai-toolkit) [`ComfyUI`](packages/diffusion/comfyui) [`Cosmos`](packages/diffusion/cosmos) [`Diffusers`](packages/diffusion/diffusers) [`Diffusion Policy`](packages/diffusion/diffusion_policy) [`FramePack`](packages/diffusion/framepack) [`Small Stable Diffusion`](packages/diffusion/small-stable-diffusion) [`Stable Diffusion`](packages/diffusion/stable-diffusion) [`Stable Diffusion WebUI`](packages/diffusion/stable-diffusion-webui) [`SD.Next`](packages/diffusion/sdnext) [`nerfstudio`](packages/nerf/nerfstudio) [`meshlab`](packages/nerf/meshlab) [`gsplat`](packages/nerf/gsplat) |
| **Mamba** | [`mamba`](packages/ml/mamba) [`mambavision`](packages/ml/mamba/mambavision) [`cobra`](packages/ml/mamba/cobra) [`dimba`](packages/ml/mamba/dimba) [`videomambasuite`](packages/ml/mamba/videomambasuite) |
| **KANs** | [`pykan`](packages/ml/kans/pykan) [`kat`](packages/ml/kans/kat) |
| **xLTSM** | [`xltsm`](packages/ml/xltsm/xltsm) [`mlstm_kernels`](packages/ml/xltsm/mlstm_kernels) |
| **Speech** | [`whisper`](packages/speech/whisper) [`whisper_trt`](packages/speech/whisper_trt) [`piper`](packages/speech/piper-tts) [`riva`](packages/speech/riva-client) [`audiocraft`](packages/speech/audiocraft) [`voicecraft`](packages/speech/voicecraft) [`xtts`](packages/speech/xtts) |
| **Home/IoT** | [`homeassistant-core`](packages/smart-home/homeassistant-core) [`wyoming-whisper`](packages/smart-home/wyoming/wyoming-whisper) [`wyoming-openwakeword`](packages/smart-home/wyoming/openwakeword) [`wyoming-piper`](packages/smart-home/wyoming/piper) |
| **3DPrintObjects** | [`PartPacker`](packages/objects/partpacker) [`Sparc3D`](packages/objects/sparc3d) |
See the [**`packages`**](packages) directory for the full list, including pre-built container images for JetPack/L4T.
Using the included tools, you can easily combine packages together for building your own containers. Want to run ROS2 with PyTorch and Transformers? No problem - just do the [system setup](/docs/setup.md), and build it on your Jetson:
```bash
$ jetson-containers build --name=my_container pytorch transformers ros:humble-desktop
```
There are shortcuts for running containers too - this will pull or build a [`l4t-pytorch`](packages/l4t/l4t-pytorch) image that's compatible:
```bash
$ jetson-containers run $(autotag l4t-pytorch)
```
> [`jetson-containers run`](/docs/run.md) launches [`docker run`](https://docs.docker.com/engine/reference/commandline/run/) with some added defaults (like `--runtime nvidia`, mounted `/data` cache and devices)
> [`autotag`](/docs/run.md#autotag) finds a container image that's compatible with your version of JetPack/L4T - either locally, pulled from a registry, or by building it.
If you look at any package's readme (like [`l4t-pytorch`](packages/l4t/l4t-pytorch)), it will have detailed instructions for running it.
#### Changing CUDA Versions
You can rebuild the container stack for different versions of CUDA by setting the `CUDA_VERSION` variable:
```bash
CUDA_VERSION=12.6 jetson-containers build transformers
```
It will then go off and either pull or build all the dependencies needed, including PyTorch and other packages that would be time-consuming to compile. There is a [Pip server](/docs/build.md#pip-server) that caches the wheels to accelerate builds. You can also request specific versions of cuDNN, TensorRT, Python, and PyTorch with similar environment variables like [here](/docs/build.md#changing-versions).
## Documentation
 * [Package List](/packages)
* [Package Definitions](/docs/packages.md)
* [System Setup](/docs/setup.md)
* [Building Containers](/docs/build.md)
* [Running Containers](/docs/run.md)
Check out the tutorials at the [**Jetson Generative AI Lab**](https://www.jetson-ai-lab.com)!
## Getting Started
Refer to the [System Setup](/docs/setup.md) page for tips about setting up your Docker daemon and memory/storage tuning.
```bash
# install the container tools
git clone https://github.com/dusty-nv/jetson-containers
bash jetson-containers/install.sh
# automatically pull & run any container
jetson-containers run $(autotag l4t-pytorch)
```
Or you can manually run a [container image](https://hub.docker.com/r/dustynv) of your choice without using the helper scripts above:
```bash
sudo docker run --runtime nvidia -it --rm --network=host dustynv/l4t-pytorch:r36.2.0
```
Looking for the old jetson-containers? See the [`legacy`](https://github.com/dusty-nv/jetson-containers/tree/legacy) branch.
### Only Tested and supported Jetpack 6.2 (Cuda 12.6) and JetPack 7 (CUDA 13.x).
> [!NOTE]
> Ubuntu 24.04 containers for JetPack 6 and JetPack 7 are now available (with CUDA support)
>
> `LSB_RELEASE=24.04 jetson-containers build pytorch:2.8`
> `jetson-containers run dustynv/pytorch:2.8-r36.4-cu128-24.04`
>
> ARM SBSA (Server Base System Architecture) is supported for GH200 / GB200.
> To install CUDA 13.0 SBSA wheels for Python 3.12 / 24.04:
>
> `uv pip install torch torchvision torchaudio \`
> `--index-url https://pypi.jetson-ai-lab.io/sbsa/cu129`
>
> See the **[`Ubuntu 24.04`](/docs/build.md#2404-containers)** section of the docs for details and a list of available containers 🤗
> Thanks to all our contributors from **[`Discord`](https://discord.gg/BmqNSK4886)** and AI community for their support 🤗
## Code Style
The project uses automated code formatting tools to maintain consistent code style. See [Code Style Guide](docs/code-style.md) for details on:
- Setting up formatting tools
- Adding your package to formatting checks
- Troubleshooting common issues
## Gallery
* [Package List](/packages)
* [Package Definitions](/docs/packages.md)
* [System Setup](/docs/setup.md)
* [Building Containers](/docs/build.md)
* [Running Containers](/docs/run.md)
Check out the tutorials at the [**Jetson Generative AI Lab**](https://www.jetson-ai-lab.com)!
## Getting Started
Refer to the [System Setup](/docs/setup.md) page for tips about setting up your Docker daemon and memory/storage tuning.
```bash
# install the container tools
git clone https://github.com/dusty-nv/jetson-containers
bash jetson-containers/install.sh
# automatically pull & run any container
jetson-containers run $(autotag l4t-pytorch)
```
Or you can manually run a [container image](https://hub.docker.com/r/dustynv) of your choice without using the helper scripts above:
```bash
sudo docker run --runtime nvidia -it --rm --network=host dustynv/l4t-pytorch:r36.2.0
```
Looking for the old jetson-containers? See the [`legacy`](https://github.com/dusty-nv/jetson-containers/tree/legacy) branch.
### Only Tested and supported Jetpack 6.2 (Cuda 12.6) and JetPack 7 (CUDA 13.x).
> [!NOTE]
> Ubuntu 24.04 containers for JetPack 6 and JetPack 7 are now available (with CUDA support)
>
> `LSB_RELEASE=24.04 jetson-containers build pytorch:2.8`
> `jetson-containers run dustynv/pytorch:2.8-r36.4-cu128-24.04`
>
> ARM SBSA (Server Base System Architecture) is supported for GH200 / GB200.
> To install CUDA 13.0 SBSA wheels for Python 3.12 / 24.04:
>
> `uv pip install torch torchvision torchaudio \`
> `--index-url https://pypi.jetson-ai-lab.io/sbsa/cu129`
>
> See the **[`Ubuntu 24.04`](/docs/build.md#2404-containers)** section of the docs for details and a list of available containers 🤗
> Thanks to all our contributors from **[`Discord`](https://discord.gg/BmqNSK4886)** and AI community for their support 🤗
## Code Style
The project uses automated code formatting tools to maintain consistent code style. See [Code Style Guide](docs/code-style.md) for details on:
- Setting up formatting tools
- Adding your package to formatting checks
- Troubleshooting common issues
## Gallery
 > [Multimodal Voice Chat with LLaVA-1.5 13B on NVIDIA Jetson AGX Orin](https://www.youtube.com/watch?v=9ObzbbBTbcc) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
> [Multimodal Voice Chat with LLaVA-1.5 13B on NVIDIA Jetson AGX Orin](https://www.youtube.com/watch?v=9ObzbbBTbcc) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
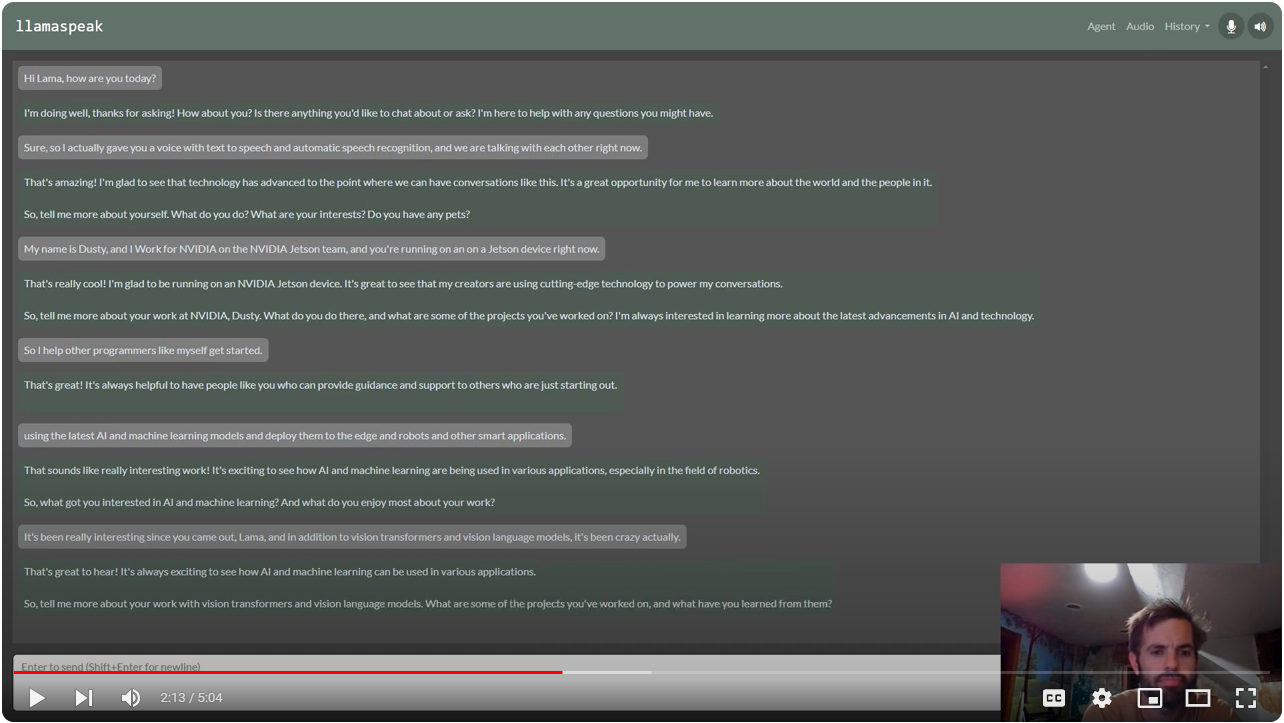 > [Interactive Voice Chat with Llama-2-70B on NVIDIA Jetson AGX Orin](https://www.youtube.com/watch?v=wzLHAgDxMjQ) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
> [Interactive Voice Chat with Llama-2-70B on NVIDIA Jetson AGX Orin](https://www.youtube.com/watch?v=wzLHAgDxMjQ) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
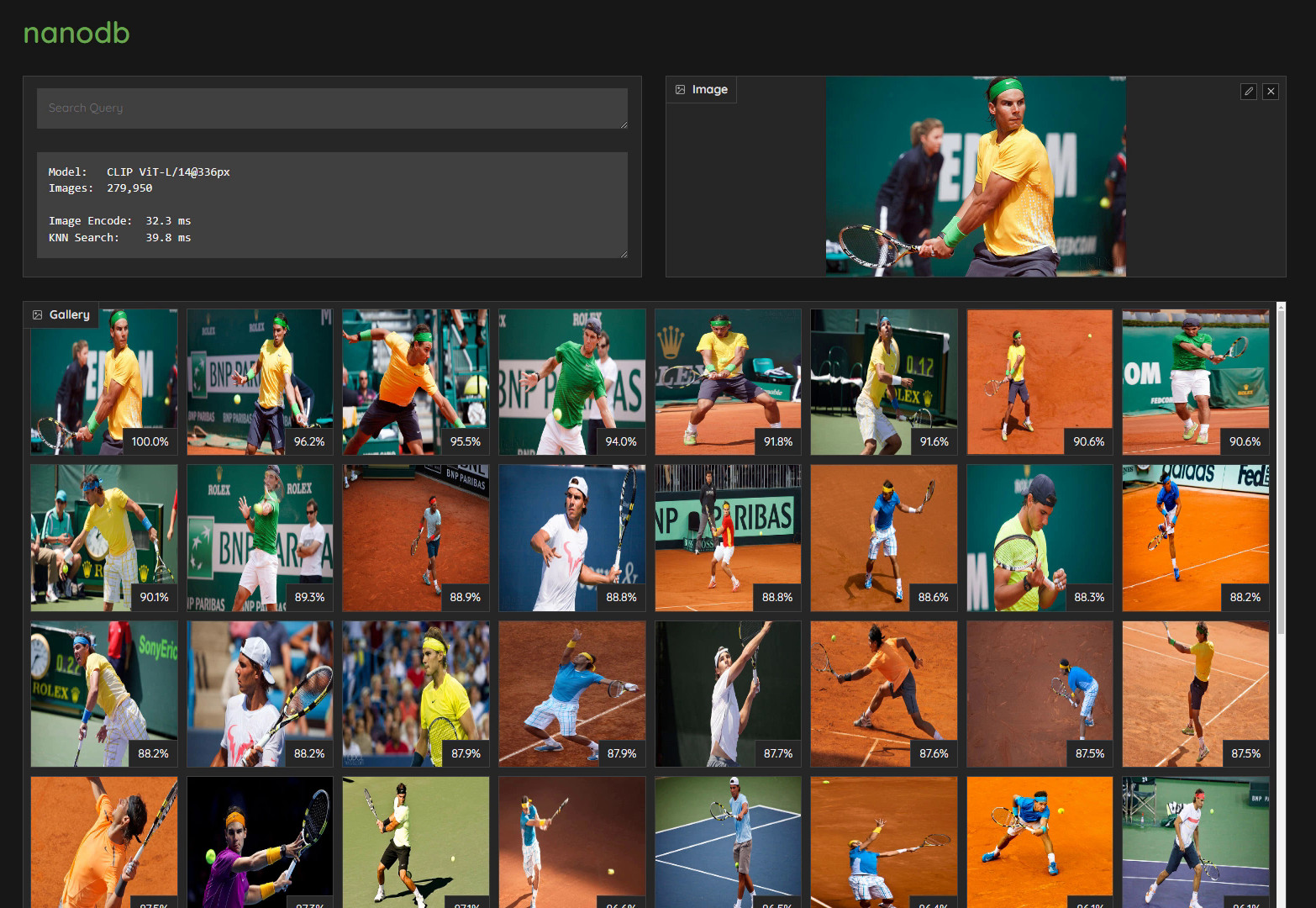 > [Realtime Multimodal VectorDB on NVIDIA Jetson](https://www.youtube.com/watch?v=wzLHAgDxMjQ) (container: [`nanodb`](/packages/vectordb/nanodb))
> [Realtime Multimodal VectorDB on NVIDIA Jetson](https://www.youtube.com/watch?v=wzLHAgDxMjQ) (container: [`nanodb`](/packages/vectordb/nanodb))
 > [NanoOWL - Open Vocabulary Object Detection ViT](https://www.jetson-ai-lab.com/tutorial_nanoowl.html) (container: [`nanoowl`](/packages/vit/nanoowl))
> [NanoOWL - Open Vocabulary Object Detection ViT](https://www.jetson-ai-lab.com/tutorial_nanoowl.html) (container: [`nanoowl`](/packages/vit/nanoowl))
 > [Live Llava on Jetson AGX Orin](https://youtu.be/X-OXxPiUTuU) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
> [Live Llava on Jetson AGX Orin](https://youtu.be/X-OXxPiUTuU) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
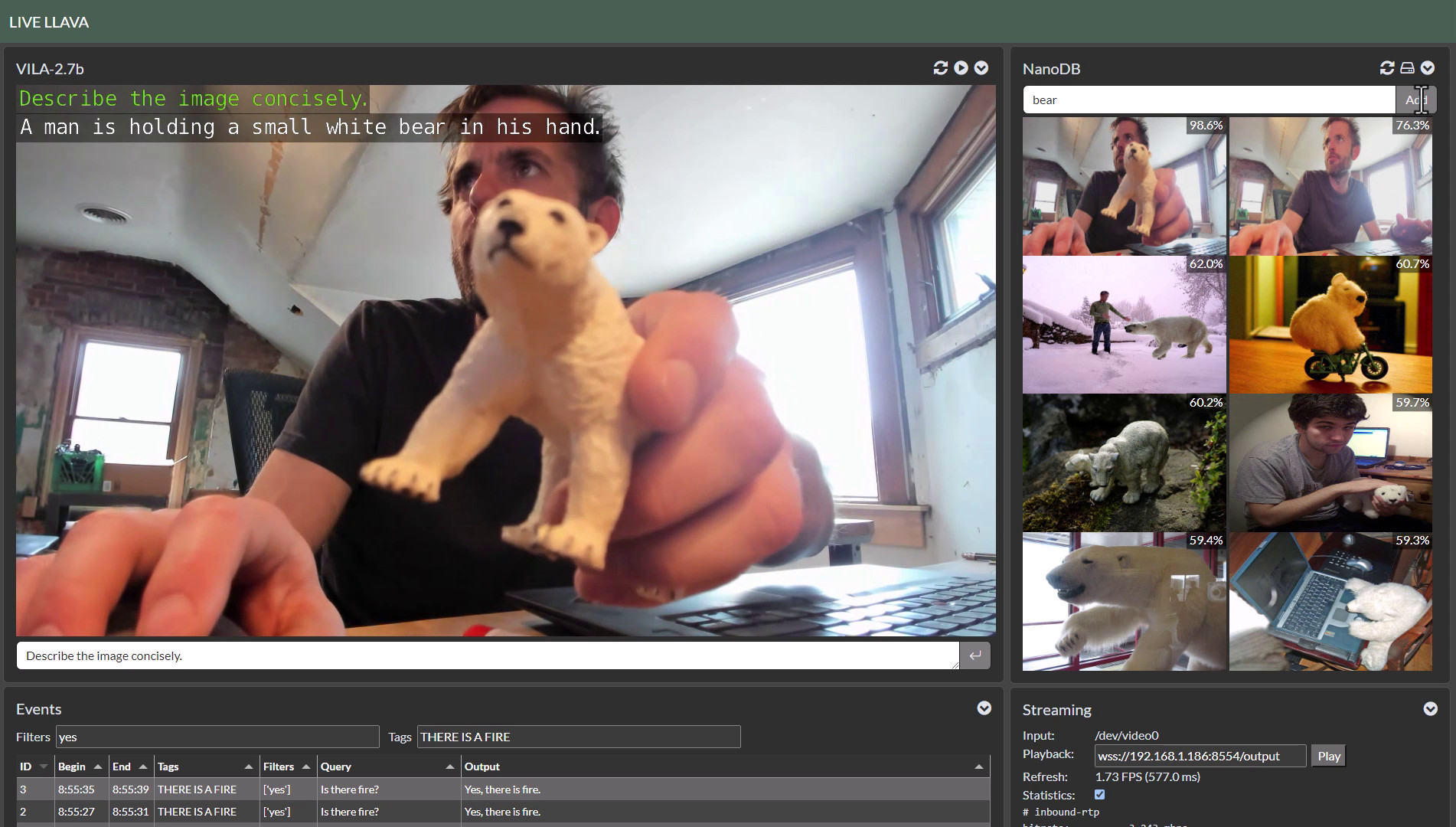 > [Live Llava 2.0 - VILA + Multimodal NanoDB on Jetson Orin](https://youtu.be/X-OXxPiUTuU) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
> [Live Llava 2.0 - VILA + Multimodal NanoDB on Jetson Orin](https://youtu.be/X-OXxPiUTuU) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
 > [Small Language Models (SLM) on Jetson Orin Nano](https://www.jetson-ai-lab.com/tutorial_slm.html) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
> [Small Language Models (SLM) on Jetson Orin Nano](https://www.jetson-ai-lab.com/tutorial_slm.html) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
 > [Realtime Video Vision/Language Model with VILA1.5-3b](https://www.jetson-ai-lab.com/tutorial_nano-vlm.html#video-sequences) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
## Citation
Please see [CITATION.cff](CITATION.cff) for citation information.
> [Realtime Video Vision/Language Model with VILA1.5-3b](https://www.jetson-ai-lab.com/tutorial_nano-vlm.html#video-sequences) (container: [`NanoLLM`](https://dusty-nv.github.io/NanoLLM/))
## Citation
Please see [CITATION.cff](CITATION.cff) for citation information.